| Issue |
Int. J. Metrol. Qual. Eng.
Volume 17, 2026
|
|
|---|---|---|
| Article Number | 6 | |
| Number of page(s) | 9 | |
| DOI | https://doi.org/10.1051/ijmqe/2025003 | |
| Published online | 03 April 2026 | |
Research Article
Finite-time synchronization of multi-manipulator systems under aperiodically intermittent communication
College of Mechanical and Electrical Engineering, China Jiliang University, Hangzhou 310018, China
* Corresponding author: This email address is being protected from spambots. You need JavaScript enabled to view it.
Received:
26
March
2025
Accepted:
22
April
2025
Abstract
This paper studies the finite-time synchronization control problem of multi-manipulator systems under aperiodically intermittent communication. In contrast to the traditional periodic intermittent communication schemes widely adopted in previous research, the introduction of aperiodic patterns breaks through the limitations of regular communication intervals. This novel approach more realistically mimics the complex and unpredictable communication conditions often encountered in actual industrial and robotic applications. By employing the appropriate auxiliary variables and establishing a velocity estimator, a coordinated tracking controller is designed to realize the finite-time synchronization. Note that the settling time monotonically increases with the maximum rest ratio that the system can tolerate. Finally, the validity of proposed finite-time synchronization strategies is verified through a numerical simulation.
Key words: Finite-time / multi-manipulator systems / aperiodically intermittent communication / coordinated tracking control
© H. Shen et al., Published by EDP Sciences, 2026
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
1 Introduction
With the booming economy and the industrial revolution, multi-agent systems (MASs) have garnered significant attention owing to their application across various industries. Compared with traditional single-agent systems, MASs are more flexible and reliable. For example, compared to a single manipulator, multi-manipulator systems can perform more complex tasks, including heavy-load lifting, item repairing, collaborative object manipulation, etc. [1–3]. However, most practical systems exhibit nonlinear characteristics. Hu et al. [4] investigated the conflict prevention path planning problems of AGVs. Additionally, MASs find widespread applications in practical systems such as driverless cars [5], drones [6], mechanical arms [7], etc. Particularly, a part of nonlinear systems can be elucidated using the Euler-Lagrange equation. This equation can better handle feedback for the velocity of the manipulators, but because of its uncertainties and nonlinearity, the results derived from linear MASs can not be directly applicable to guarantee the synchronization of Euler-Lagrange systems. Nevertheless, note from [8] that the synchronization and containment problems of the multiple uncertain Euler-Lagrange systems could be solved. The model of multi-manipulator systems is determined by Euler Lagrange equations.
Even if the multi-manipulator systems have many advantages, they are still susceptible to various factors such as communication interruptions, equipment damage, etc. Intermittent communication is more prevalent in practice than other factors. Thus, in view of this issue, a distributed coordinated tracking control strategy was designed as described in references [9]. To ensure that the multi-robot systems don't lose mission-critical data under intermittent communications, a multi-layer networking solution was designed [10]. The intermittent communications considered above are all periodic, which involve fixed interruption of communication time and rest time. However, this does not accurately reflect the intermittent communication that exists in reality. The synchronization problem under aperiodic intermittent communication has been studied [11–13]. Taking the discrete-time stochastic delayed into account, the stabilization of neural networks by intermittent control was investigated [11]. The synchronization of second-order MASs under aperiodically intermittent communication was reached by designing a sampled-hold-based intermittent communication [12]. Furthermore, considering the problem of nonlinear delayed MASs under aperiodically intermittent communication, the author proposed a leader-following controller to solve the problem [14]. The study of aperiodically intermittent communication in multi-manipulator systems has been limited, underscoring the significance of our research work.
In the study of MASs, it is inevitable to discuss the synchronization problem. Both the literature [15,16] have provided many meaningful results [15,16]. Reference [15] reviewed advances in multi agent system coordination and analyzed key approaches and open challenges. Reference [16] reviewed recent advances in constrained multi-agent consensus and coordination, categorizing key approaches and their applications to smart grids and clustering algorithms. In facing actual task requirements, we aim for the systems to reach a synchronization state within a limited time so that the subsequent work can proceed. Therefore, a finite-time controller is necessary to control the entire system. Consequently, a finite-time strategy tailored for heterogeneous MASs was developed [17]. Du et al. [18] studied the finite-time synchronization problem of MASs under directed topology using an event-triggered strategy. According to the homogeneous theorem, references [19–21] investigated the synchronization problems of multi-agents and complex networks in finite-time [19–21]. However, the systems discussed above are linear systems and in actual production, nonlinear systems are more common. Therefore, in recent years, attention has gradually shifted towards nonlinear systems. For example, a smooth adaptive finite-time strategy was proposed for multiple Euler-Lagrange systems, addressing systems uncertainties and external disturbances [22]. In [23], a finite-time protocol is proposed for the coordinated behavior of multiple Euler-Lagrange systems in cooperative competitive networks [23]. To address the problem of finite-time cooperative control inherent in multi-manipulator systems, Van et al. [24] optimized control method using integral sliding mode control and improved robustness to issues including systems interference and model uncertainty. However, there exists a scarcity of research addressing finite-time synchronization under aperiodically intermittent communication.
In this paper, we investigate the finite-time synchronization control problem of multi-manipulator systems under aperiodically intermittent communication. The main work and contributions of this paper are as follows.
A new finite-time estimator is established to estimate unknown velocities. In addition, for unknown velocities of Euler-Lagrange systems, the estimator is designed to obtain a number of sufficient conditions that guarantee finite-time synchronization of multi-manipulator systems.
For multi-manipulator systems under intermittent communication, a new distributed finite-time synchronization strategy is designed. Different from intermittent communications in [10], our considered intermittent communication scheme is completely aperiodic.
Several novel criteria are obtained to guarantee finite-time synchronization of multi-manipulator systems under aperiodically intermittent communication. Moreover, the settling time can be accurately estimated.
Notations: Through this paper, for a given scalar l > 0,  and sgn (•) means the signal function. ‖• ‖ denotes the Euclidean vector norm or its induced matrix two-norm. ⊗ stands for Kronecker product.
and sgn (•) means the signal function. ‖• ‖ denotes the Euclidean vector norm or its induced matrix two-norm. ⊗ stands for Kronecker product.
2 Preliminaries and problem formulations
2.1 Algebraic graph theory
In the paper, the communication topology for multi-manipulator systems is set as an undirected graph. Let 𝒢 = {𝒱, ε, 𝒜}, where the node set is denote by 𝒱 = {1, 2, … , N}, the edge set ε ⊂ 𝒱 × 𝒱 and  is the weighted adjacency matrix. Define as an edge εij in ε and εij = (vi, vj). The signed weight aij = 1, if the information from the node jth can be received by the node ith. Otherwise, aij = 0. Furthermore, aii = 0. The neighbors of node i are defined as 𝒩i = {j|aij ≠ 0}. Define the degree matrix 𝒟 = {d1, d2, d3, … , dN}. The Laplacian matrix for the graph 𝒢 is ℒ = 𝒟 − 𝒜, and ℒ = [lij] ∈ ℛN×N is described as
is the weighted adjacency matrix. Define as an edge εij in ε and εij = (vi, vj). The signed weight aij = 1, if the information from the node jth can be received by the node ith. Otherwise, aij = 0. Furthermore, aii = 0. The neighbors of node i are defined as 𝒩i = {j|aij ≠ 0}. Define the degree matrix 𝒟 = {d1, d2, d3, … , dN}. The Laplacian matrix for the graph 𝒢 is ℒ = 𝒟 − 𝒜, and ℒ = [lij] ∈ ℛN×N is described as  .
.
There exists node 0 that is assigned as the leader system. And then the graph  is defined the graph with the leader node included. So, the communication topology involves N + 1 nodes, and the matrix ℋ = ℒ + G is denoted, where G = diag{ai0, ai1, ai2, … , aiN}, i = 1, 2, 3, … , N. If the information from leader node 0 can be passed to the ith follower, the weighting gain ai0 = 1, otherwise, ai0 = 0.
is defined the graph with the leader node included. So, the communication topology involves N + 1 nodes, and the matrix ℋ = ℒ + G is denoted, where G = diag{ai0, ai1, ai2, … , aiN}, i = 1, 2, 3, … , N. If the information from leader node 0 can be passed to the ith follower, the weighting gain ai0 = 1, otherwise, ai0 = 0.
Assumption 2.1. For the graph  , there exists at least one path between any two nodes.
, there exists at least one path between any two nodes.
2.2 Problem formulation
The multi-manipulator systems are represented as
 (1)
(1)
where i = 1, 2, … , N,  and
and  describe the state vector of the ith position, velocity and acceleration of every mechanical arm. Mi (xi) ∈ ℛn×n is a positive definite inertia matrix,
describe the state vector of the ith position, velocity and acceleration of every mechanical arm. Mi (xi) ∈ ℛn×n is a positive definite inertia matrix,  is Coriolis and centripetal forces matrix, Gi (xi)) ∈ ℛn is the gravity vector, τi (t) ∈ ℛn is generalized force vector.
is Coriolis and centripetal forces matrix, Gi (xi)) ∈ ℛn is the gravity vector, τi (t) ∈ ℛn is generalized force vector.
The system (1) can be rewritten as
 (2)
(2)
where M (x) = diag{M1 (x1), M2(x2), …, Mn (xn)}, C(x,  ) = diag{C1(x1,
) = diag{C1(x1,  ),C2(x2,
),C2(x2,  ), …, Cn(xn,
), …, Cn(xn,  )},
)},  ,
,  ,
,  .
.
The leader is given by the following
 (3)
(3)
where Q is a constant.
The error systems are defined as follows
 (4)
(4)
where eqi = 0 and evi = 0.
According to (1) and  ,
,
 (5)
(5)
The system (1) is characterized by the following properties:
Property 2.1. [25]  represents a skew-symmetric matrix.
represents a skew-symmetric matrix.
Property 2.2. [25]  , kc and kg are defined as positive constants. For ∀i ∈ 𝒱,
, kc and kg are defined as positive constants. For ∀i ∈ 𝒱,  ,
,  and ‖Gi (xi) ‖ ≤ kg.
and ‖Gi (xi) ‖ ≤ kg.
Definition 2.1. Under Assumption 1, multi-manipulator systems are regarded to have reached synchronization in finite-time t0 if the following conditions can be met,
 (6)
(6)
where i = 1, 2, 3, … , N and t0 > 0.
Assumption 2.2. The generalized velocity and acceleration of the leader do not grow infinitely.
Lemma 2.1. [26] For ∀x, y ∈ ℛn and ℐ > 0, one has 2xTy ≤ ℐxTx + ℐ−1yTy.
Lemma 2.2. [27] There exist a Laplacian matrix L and a diagonal matrixB. If Assumption 1 holds and the graph doesn't have nonnegative weights, then there exists a positive diagonal matrix F = diag (f1, f2, f3, … , fn), where  , c = [c1, c2, c3, … , cn]T = (L + B)−11N, d = [d1, c2, d3, … , dn]T = (L + B)−T1N, and it satisfied U = FH + HTF > 0, where H = L + B.
, c = [c1, c2, c3, … , cn]T = (L + B)−11N, d = [d1, c2, d3, … , dn]T = (L + B)−T1N, and it satisfied U = FH + HTF > 0, where H = L + B.
Definition 2.2. [28] For aperiodically intermittent communication, a constant 0 ≤ ϵ < 1 is defined as follows, for m = 0, 1, 2, 3, …
 (7)
(7)
The communication situation with intermittent communication consists of the normal communication time Tm = [tm, sm) and the intermittent communication time Ts = [sm, tm+1). Clearly, aperiodically intermittent communication transitions to continuous communication when ϵ=0.
Assumption 2.3. There exist two positive scalars 0< ρ < μ < + ∞, for m = 0, 1, 2, …,
 (8)
(8)
As defined in equation (8), it can be seen that ρ represents the minimum permitted communication time in aperiodic intermittent communication, while μ indicates the maximum interruption time of communication.
Lemma 2.3. [29] Assume zi ∈ ℝ+, i = 1, 2, 3, … , ℓ and ℵ ∈ (0, 1), then
 (9)
(9)
Lemma 2.4. [29] For q1, q2, q3, … , qn ∈ Rn and 0 < p < 2, then
 (10)
(10)
Lemma 2.5. [30] Suppose that there exist a continuous system  which f (0) = 0, a positive definite function V(t) and its neighborhood U ∈ Rn×N at the origin satisfy the following equations
which f (0) = 0, a positive definite function V(t) and its neighborhood U ∈ Rn×N at the origin satisfy the following equations
 (11)
(11)
so that V (t) ≡ 0, when t ≥ T* and the setting time satisfies
 (12)
(12)
Lemma 2.6. [31] Assume a continuous and positive definite function V(t), and the following equations can be satisfied:
 (13)
(13)
where v1, v2 ≥ 0, 0 < p < 1 then
 (14)
(14)
The settling time T satisfies
 (15)
(15)
2.3 Control design
A finite-time control protocol under aperiodic intermittent communication will be designed. Two auxiliary variables are defined by the following equations
 (16)
(16)
 (17)
(17)
where 0 < α < 1, k1, k2, k3 and k4 are positive constants that will be designed later, si represents the virtual error of the ith follower and satisfies the following equation
 (18)
(18)
here  is the estimates for the ith follower,
is the estimates for the ith follower,
 (19)
(19)
where y1 > 0, 0 < u < 1, and  is the adjacency matrix of an undirected graph 𝒢ℬ describing the information exchange between N followers of
is the adjacency matrix of an undirected graph 𝒢ℬ describing the information exchange between N followers of  , and if there is a path between the leader x0 and the ith follower, bi0 = 1, otherwise, bi0 = 0. The Laplacian matrix LB for graph 𝒢ℬ is defined by
, and if there is a path between the leader x0 and the ith follower, bi0 = 1, otherwise, bi0 = 0. The Laplacian matrix LB for graph 𝒢ℬ is defined by  , where 𝒟ℬ is the degree matrix.
, where 𝒟ℬ is the degree matrix.
Remark 3.1. Due to environmental disturbances, equipment damage, and network congestion, the systems cannot maintain continuous communication. Consequently, the control protocols must be designed differently for intermittent communication compared to continuous communication.
3 Results
3.1 The finite-time synchronization of estimator under aperiodic intermittent communication
In this part, we delve into the finite-time synchronization of the designed estimator.
Theorem 1. Suppose that the graph  satisfies Assumption 1 and Assumption 2, then
satisfies Assumption 1 and Assumption 2, then  converages to zero within a finite-time T1, where T1 satisfies
converages to zero within a finite-time T1, where T1 satisfies
Proof. When t ∈ Tm, the following equation can be obtained
And then, let  ,
,
 (20)
(20)
where  , ℋℬ = LB + diag (b10, b20, b30, … , bn0). If the graph 𝒢ℬ satisfies Assumption 1, then the eigenvalues of ℋℬ are positive. And a symmetric positive definite matrix ℱ ∈ ℛN×N satisfied 𝒰 = ℱ ℋ ℬ + ℋ ℬTℱ > 0.
, ℋℬ = LB + diag (b10, b20, b30, … , bn0). If the graph 𝒢ℬ satisfies Assumption 1, then the eigenvalues of ℋℬ are positive. And a symmetric positive definite matrix ℱ ∈ ℛN×N satisfied 𝒰 = ℱ ℋ ℬ + ℋ ℬTℱ > 0.
The Lyapunov candidate function is considered as
 (21)
(21)
where fi is as same as Lemma 2.
The derivative of V0 is
Combining with Lemma 2, it can be deduced that
 (22)
(22)
Based on Lemma 4, one has
 (23)
(23)
where  , fmax = max {f1, f2, f3, … , fn}.
, fmax = max {f1, f2, f3, … , fn}.
When t ∈ Ts,  is clearly visible. It is obviously that the Lyapunov candidate function of
is clearly visible. It is obviously that the Lyapunov candidate function of  is less than or equal to 0, which makes
is less than or equal to 0, which makes  .
.
Via Lemma 4, the estimator converges to 0 in a finite-time  .
.
Remark 3.2. Sometimes it is hard to get the exact speed of the leader in actual multi-manipulator systems. Therefore, we designed a new estimator for each manipulator system to estimate the unmeasurable velocities under aperiodically intermittent communication.
3.2 Finite-time synchronization under aperiodically intermittent communication
Substituting (18), (17) and (15) into (5), the following equations are obtained
 (24)
(24)
where ei (t) = xi (t) − x0 (t),  .
.
Then, the following control protocols are proposed:
 (25)
(25)
where a and y are positive scalars.
Theorem 2. Suppose the graph 𝒢 satisfies Assumption 1, and there are positive constants ℐ, l1 and l2 satisfying the following inequalities
I − 2k1λmin (ℋ) ≤ − l1
I−1 − 2k3λmin (ℋ) − 2 (a + y) ≤ − l1
I−1 − 2 (a + y) ≤ l2
I ≤ l2
l1 − (l1 + l2) ϵ > 0.
Then, the systems (1) can achieve synchronization within a finite-time T under the designed control protocols (25).
 (26)
(26)
Proof. Combining (20) and (16) yields the following systems
 (27)
(27)
Consider the candidate Lyapunov function
 (28)
(28)
Step 1: When t ∈ Tm, the derivation of the Lyapunov function becomes
where 
Note that
So, we have
with B = diag (a10, a20, a30, … , an0),  .
.
Substituting 𝒱 into V1
 (29)
(29)
Step 2: When t ∈ Ts, it can be acquired that
 (30)
(30)
And V (t) ≡ 0, according to Lemma 6, ∀t > T, where T is given by
 (31)
(31)
So, V (t) converging to 0 shows that the systems (1) have reached synchronization under aperiodically intermittent communication within the time [0, T] by employing the designed protocol (25).
Remark 3.3. From the selection conditions of control gain, it can be seen that its magnitude depends on the number of manipulators in the network and the eigenvalues of the Laplacian matrix. These factors constitute global information that must be precisely known to the designer.
Remark 3.4. If the dynamics equation of the leader is
 (32)
(32)
The control protocol is changed to
 (33)
(33)
This means that the leader's information is known by other followers. To better reach the control objectives, a distributed controller needs to be designed, which is huge challenge for us to achieve synchronization in finite-time.
Remark 3.5. Our research on the finite-time synchronization of multi-manipulator systems under aperiodically intermittent communication has notable practical applications. In industrial automation, it can enhance the efficiency and flexibility of assembly lines, effectively dealing with communication disruptions caused by electromagnetic interference or network congestion. In disaster response scenarios like earthquake-stricken areas or hazardous chemical leak sites, this approach enables multi-manipulator robotic systems to operate smoothly even with unstable communication, facilitating search and rescue, debris removal, and environmental monitoring tasks.
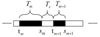 |
Fig. 1 Diagram of intermittent communication. |
4 Simulation example
This part aims to provide a numerical simulation example to verify our control protocol. The system considered in the simulation has four followers and one leader, and the connection paths between them are shown in Figure 2.
Consider two-link multi-manipulator systems, and the state equation of each manipulator is established by systems (1), where  , τi = [τi (1)τi (2)]T, the inertia matrix Mi (xi) ∈ ℛ2×2, the Coriolis and centripetal forces matrix
, τi = [τi (1)τi (2)]T, the inertia matrix Mi (xi) ∈ ℛ2×2, the Coriolis and centripetal forces matrix  and the Gravity vector Gi (xi) ∈ ℛ2 are given by the following equation
and the Gravity vector Gi (xi) ∈ ℛ2 are given by the following equation
 (34)
(34)
 (35)
(35)
 (36)
(36)
where a1 = 2.25 kg × m2, a2 = 0.1 kg × m2, a3 = 0.04 kg × m2, a4 = 0.2 kg × m2, a5 = 1 kg × m2, g = 9.8 m × s2. The initial position information of following agents are given as
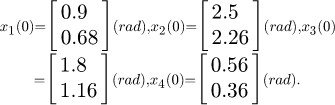
The initial velocity information of following agents are given as
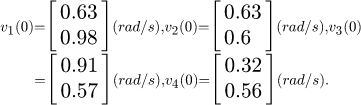
The position and velocity of leader agent are given as

Suppose that two-link multi-manipulator systems are moving with a leader as the desired target. Then, according to the algorithm, the following parameters will be obtained. Consider k1 = 8, k2 = 3, k3 = 3, k4 = 2, a = 0.5, y = 1.2, u = 0.7, α = 0.3. Based on the above parameters, the values for l1 and l2 are 2.1, 1.6,then ϵ = 0.567. We set the interrupt communication to [0.5, 2]∪[2.5, 3.5]∪[3.7, 4.7]∪[5,6]∪[6.3, 6.8].
From Figure 3, it can be seen that the designed estimator can estimate the system's velocity in finite-time. Figures 4 and 5 show the position and velocity trends of the leader and the follower under the designed synchronization protocol, demonstrating gradual convergence to the leader. Finite-time convergence of the multi-manipulator system is guaranteed by the designed control protocol despite intermittent communication, as demonstrated in the results.
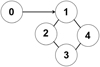 |
Fig. 2 Topographical graph. |
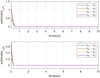 |
Fig. 3 Error between the speed of the estimator |


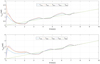 |
Fig. 4 Position of agentsx1, x2, x3, x4, x0. |
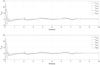 |
Fig. 5 Velocity of agentsv1, v2, v3, v4, v0. |
5 Conclusion
This paper has investigated the finite-time synchronization of multi-manipulator systems under aperiodically intermittent communication. A velocity estimator and a finite-time controller have been designed by constructing auxiliary variables. Then, the designed control algorithm has proven that the synchronization can be reached in finite-time. The theoretical proof of our control algorithm confirms that finite-time synchronization can be achieved, marking a major leap forward in the research of multi-manipulator systems with irregular communication. Finally, simulation results have been used to validate all the theories in this paper. The consideration of aperiodically intermittent communication enriches the theoretical system of multi-manipulator control and provides an essential basis for the design and improvement of robotic systems in scenarios with unstable or limited communication, including remote control operations, mobile robotic tasks, and distributed industrial automation processes. In the future, we will continue to study the fixed control and energy estimation of multi-manipulator systems under aperiodic intermittent control.
Funding
This work is supported in part by the National Natural Science Foundation of China (62303434), the Natural Science Foundation of Zhejiang Province of China (LQ23F030008), the Fundamental Research Funds for the Provincial Universities of Zhejiang Province of China (2023YW40), and the Key Research and development Program of Zhejiang Province (2023C03186).
Conflicts of interest
The authors have nothing to disclose.
Data availability statement
The data that support the findings of this study are available from the corresponding author upon reasonable request.
Author contribution statement
Conceptualization, Hui Shen and Dan Liu; Methodology, Hui Shen; Software, Hui Shen; Validation, Dan Liu; Formal Analysis, Dan Liu; Investigation, Hui Shen and Dan Liu; Resources, Binrui Wang; Data Curation, Hui Shen; Writing — Original Draft Preparation, Hui Shen; Writing — Review & Editing, Dan Liu; Visualization, Dan Liu; Supervision, Binrui Wang; Project Administration, Binrui Wang; Funding Acquisition, Binrui Wang.
References
- S. Hirche et al., Distributed control for cooperative manipulation with event-triggered communication, IEEE Trans. Robot. 36, 1038–1052 (2020) [Google Scholar]
- J. Franko, S. Du, S. Kallweit et al., Design of a multi-robot system for wind turbine maintenance, Energies 13, 2552 (2020) [Google Scholar]
- C. Su, S. Zhang, S. Lou et al., Trajectory coordination for a cooperative multi-manipulator system and dynamic simulation error analysis, Robot. Auton. Syst. 131, 103588 (2020) [Google Scholar]
- H. Hu, X. Yang, S. Xiao et al., Anti-conflict AGV path planning in automated container terminals based on multi-agent reinforcement learning, Int. J. Prod. Res. 61, 65–80 (2023) [Google Scholar]
- F. Zong, Z. He, M. Zeng et al., Dynamic lane changing trajectory planning for CAV: a multi-agent model with path preplanning, Transportmetr. B: Transport Dyn. 10, 266–292 (2022) [Google Scholar]
- Z. Xia, J. Du, J. Wang et al., Multi-agent reinforcement learning aided intelligent UAV swarm for target tracking, IEEE Trans. Vehicular Technol. 71, 931–945 (2021) [Google Scholar]
- L. Zhao, J. Yu, Q.G. Wang, Adaptive finite-time containment control of uncertain multiple manipulator systems, IEEE Trans. Cybern. 52, 556–567 (2020) [Google Scholar]
- R. Cao, L. Cheng, Distributed dynamic event-triggered control for Euler-Lagrange multiagent systems with parametric uncertainties, IEEE Trans. Cybern. 53, 1272–1284 (2023) [Google Scholar]
- Y. Zhang, Y. Jiang, W. Zhang et al., Distributed coordinated tracking control for multi-manipulator systems under intermittent communications, Nonlinear Dyn. 107, 3573–3591 (2022) [Google Scholar]
- M. Saboia, L. Clark, V. Thangavelu et al., Achord: Communication-aware multi-robot coordination with intermittent connectivity, IEEE Robot. Autom. Lett. 7, 10184–10191 (2022) [Google Scholar]
- P. Wang, Q. He, H. Su, Stabilization of discrete-time stochastic delayed neural networks by intermittent control, IEEE Trans. Cybern. 53, 2017–2027 (2023) [Google Scholar]
- F. Wang, Z. Liu, Z. Chen, Sampled-hold-based consensus control for second-order multiagent systems under aperiodically intermittent communication, IEEE Trans. Circ. Syst. I: Regular Papers 69, 3794–3803 (2022) [Google Scholar]
- Y. Guo, Y. Qian, P. Wang, Leader-following consensus of delayed multi-agent systems with aperiodically intermittent communications, Neurocomputing 466, 49–57 (2021) [Google Scholar]
- A. Abdessameud, I.G. Polushin, A. Tayebi, Synchronization of heterogeneous Euler-Lagrange systems with time delays and intermittent information exchange, IFAC Proc. 47, 1971–1976 (2014) [Google Scholar]
- Y. Cao, W. Yu, W. Ren et al., An overview of recent progress in the study of distributed multi-agent coordination, IEEE Trans. Ind. Inform. 9, 427–438 (2012) [Google Scholar]
- J. Qin, Q. Ma, Y. Shi et al., Recent advances in consensus of multi-agent systems: a brief survey, IEEE Trans. Ind. Electron. 64, 4972–4983 (2016) [Google Scholar]
- Y. Wu, J. Hu, L. Xiang et al., Finite-time output regulation of linear heterogeneous multi-agent systems, IEEE Trans. Circuits Syst. II: Exp. Briefs 69, 1248–1252 (2021) [Google Scholar]
- Y. Wu, J. Hu, L. Xiang et al., Finite-time consensus for linear multiagent systems via event-triggered strategy without continuous communication, IEEE Trans. Circ. Syst. II: Express Briefs 7, 19–29 (2019) [Google Scholar]
- H. Hong, W. Yu, J. Fu et al., Finite-time connectivity-preserving consensus for second-order nonlinear multiagent systems, IEEE Trans. Control Netw. Syst. 6, 236–248 (2018) [Google Scholar]
- T. Jing, D. Zhang, T. Jing, Finite-time synchronization of hybrid-coupled delayed dynamic networks via aperiodically intermittent control, Neural Process. Lett. 52, 291–311 (2020) [Google Scholar]
- S. Tong, H. Zhou, Finite-time adaptive fuzzy event-triggered output-feedback containment control for nonlinear multiagent systems with input saturation, IEEE Trans. Fuzzy Syst. 31, 3135–3147 (2023) [Google Scholar]
- N. Xuan-Mung, M. Golestani, Smooth, singularity-free, finite-time tracking control for Euler-Lagrange systems, Mathematics 10, 3850 (2022) [Google Scholar]
- H.X. Hu, G. Wen, W. Yu et al., Finite-time coordination behavior of multiple Euler-Lagrange systems in cooperation-competition networks, IEEE Trans. Cybern. 49, 2967–2979 (2019) [Google Scholar]
- M. Van, S. Sam Ge, D. Ceglarek, Global finite-time cooperative control for multiple manipulators using integral sliding mode control, Asian J. Control 24, 2862–2876 (2022) [Google Scholar]
- A.J. Critchlow, Introduction to Robotics (MacMillan Press Ltd., London, 1985) [Google Scholar]
- R.A. Horn, C.R. Johnson, Matrix Analysis (Cambridge University Press, Cambridge, 1985) [Google Scholar]
- H. Zhang, Z. Li, Z. Qu et al., On constructing Lyapunov functions for multi-agent systems, Automatica 58, 39–42 (2015) [Google Scholar]
- X. Liu, T. Chen, Synchronization of linearly coupled networks with delays via aperiodically intermittent pinning control, IEEE Trans. Neural Netw. Learn. Syst. 26, 2396–2407 (2015) [Google Scholar]
- Y. Wu, Z. Sun, G. Ran et al., Intermittent control for fixed-time synchronization of coupled networks, IEEE-CAA J. Autom. Sin. 10, 1488–1490 (2023) [Google Scholar]
- J. Mei, M. Jiang, W. Xu et al., Finite-time synchronization control of complex dynamical networks with time delay, Commun. Nonlinear Sci. Numer. Simul. 18, 2462–2478 (2013) [Google Scholar]
- L. Cheng, F. Tang, X. Shi et al., Finite-time and fixed-time synchronization of delayed memristive neural networks via adaptive aperiodically intermittent adjustment strategy, IEEE Trans. Neural Netw. Learn. Syst. 34, 8516–8530 (2023) [Google Scholar]
Cite this article as: Hui Shen, Dan Liu, Binrui Wang, Finite-time synchronization of multi-manipulator systems under aperiodically intermittent communication, Int. J. Metrol. Qual. Eng. 17, 6 (2026), https://doi.org/10.1051/ijmqe/2025003
All Figures
|
Fig. 1 Diagram of intermittent communication. |
| In the text | |
|
Fig. 2 Topographical graph. |
| In the text | |
|
Fig. 3 Error between the speed of the estimator |
| In the text | |
|
Fig. 4 Position of agentsx1, x2, x3, x4, x0. |
| In the text | |
|
Fig. 5 Velocity of agentsv1, v2, v3, v4, v0. |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.